

De plus en plus d’éleveurs se tournent vers une solution automatisée pour préparer et distribuer la ration. En effet, les robots d’alimentation apportent une régularité dans la préparation des recettes sans oublier un plus grand nombre de passages, valorisant les rations humides, tout en allégeant le temps de travail. Cependant, il ne faut pas oublier que le robot se compose de différents éléments indispensables, notamment la cuisine.
Que ce soit dans le fonctionnement de chaque composant, la méthode de chargement ou encore l’infrastructure des cuisines, chaque marque possède sa spécificité.
Le stockage des aliments
Lors de l’élaboration du projet de robot d’alimentation, la cuisine joue un grand rôle dans le choix du modèle. Pour la plupart des solutions, le ravitaillement s’effectue en remplissant des caissons avec du vrac. La majorité offre un volume de 15 à 20 m³et des variantes existent allant jusqu’à 40 m³. Leur remplissage est réalisé à l’aide d’un simple godet. Un godet désileur peut être utilisé, mais n’est pas nécessaire puisqu’en fin de caisse se trouve des démêleurs, venant éclater les gros volumes. En fonction de la marchandise, un godet désileur pourrait justement baisser la qualité en accélérant la déshydratation de l’ensilage.
Un constructeur possède cependant un système bien à lui, il s’agit du néerlandais Lely. En effet, sa cuisine n’utilise pas de caisson mais un sol plat, sur lequel sont positionnés des repères afin d’y déposer des blocs d’ensilage. Une pince suspendue vient alors attraper les aliments pour les déposer dans le bol mélangeur.
En ce qui concerne les aliments secs, des silos-tours peuvent compléter la cuisine. Des vis élévatrices viennent ensuite se greffer, ajoutant les tourteaux aux autres aliments.
Deux façons de mélanger
Une fois les caissons remplis, le robot va pouvoir commencer son travail, du moins si c’est lui le premier maillon de la chaîne. En effet, deux visions s’opposent : les robots distributeurs qui ne mélangent pas et les robots mélangeurs comportant un système de mixage des composants de la ration.
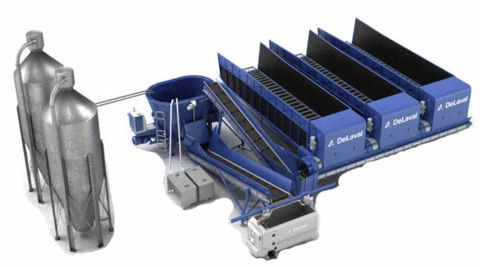
Jeantil et de DeLaval ont fait le choix du robot distributeur, avec un bol fixe faisant office d’intermédiaire entre les caissons et le robot distributeur.

Lucas G aussi opte pour cette configuration, et en profite pour laisser le choix entre une mélangeuse fixe avec des vis horizontales ou verticales. Une machine supplémentaire offre la possibilité au bol fixe de travailler lorsque le robot est en phase de distribution. Il faudra en contrepartie accepter d’avoir une cuisine plus volumineuse. Un système de convoyeurs doit alors être présent pour transiter les aliments.

Dans la seconde catégorie, celle des robots mélangeurs, se trouvent les cuisines de GEA et la T30 de Trioliet. Le robot vient se positionner sous le caisson qui déverse la dose d’aliment nécessaire. Le robot navigue ainsi entre chaque stockage, puis mélange et distribue. BouMatic a fait un compromis, puisque c’est bien le robot qui mélange, mais rempli par un convoyeur relié à chaque cellule. Enfin, pour le Vector de Lely, c’est la pince qui se déplace, mais là encore, c’est le robot qui mélange tout en stationnant.

Trioliet donne le choix
Alors que chaque marque ne dispose que d’un seul type de cuisine, Trioliet en possède trois différentes, chacune ayant ses spécificités. En plus de la T30 où les caissons remplissent le bol mélangeur en direct, le catalogue se compose de la T20 et T40.
Relativement simple, la T20 est pensée pour des élevages utilisant une ration de base dans laquelle les aliments secs diffèrent en fonction des lots d’animaux. La base commune est alors préparée dans un bol fixe, avec les aliments communs à tous les lots. Chaque ration est ensuite ajustée lors du remplissage du robot, qui effectue le mélange avant de distribuer. Cette solution évite de grosses infrastructures puisqu’elle se passe des caissons en vrac, et s’accompagne uniquement de silos-tours.

La T40, en revanche, est plus originale. Pouvant être composée de huit caissons (contre huit pour la T30), le ravitaillement se fait avec des blocs d’ensilage. En fond de caisse, pas de fraise pour décompacter l’ensilage, mais des lames circulaires venant gratter les aliments avec des mouvements verticaux. Ces derniers tombent alors sur un convoyeur, et sont emmenés jusqu’au robot, faisant le mélange avant de se diriger vers l’auge.







